EL PROYECTO
Inicio este blog para ir mostrando los avances y como voy a desarrollar cada parte de mi R2-D2.
Después de ver muchas paginas de construcción de unidades R2-D2, algunas muy trabajadas y otras no tanto, ya he decidido como voy a desarrollar mi R2-D2. Quiero ser realista y no pretender mas allá de lo que pueda abarcar, yo no tengo un taller apropiado para mecanizar piezas en CNC ni siquiera (a día de hoy) una impresora 3D, con lo cual todo ha de ser comprado o fabricado por terceros.
A este efecto decidí comprar la cabeza ya pre-formada en aluminio de 1mm de espesor, cuyo diámetro es de 461mm.
Tal y como se puede ver en la foto, también compre los holo-proyectores en aluminio, me pareció un acabado espectacular y apropiado para lo que quiero implementar. Os dejo los enlaces a la pagina y el correo de Michael (Brutus2000) que es quien fabrica estas y otras maravillas en aluminio en Europa.
Mis objetivos y pretensiones para el proyecto son los siguientes:
En la cabeza:
- Automatizar todas las compuertas y holo-proyectores con servos rc.
- Holo-proyectores con iluminación personalizable (RGBW).
- Los paneles de leds podrán mostrar textos, dibujos o datos relevantes del robot.
- Cámara de vídeo on-line en el radar-eye.
- Implementar el periscopio y el radar.
- Se podrá ampliar y modificar la capacidad de las automatizaciones.
En el cuerpo:
- Automatizar las compuertas con servos rc (las que se crea conveniente).
- Intentar el sistema 3-2-3 para replegado de la pata central.
- Electrónica de control central y sistema de orientación y telemetria.
- Sistema de audio para los sonidos.
Para lograr que todo este sistema funcione es necesario crear pequeños módulos de control que han de estar unidos por un bus de comunicación.
Centrándome en la cabeza, he hecho un recuento de 20 servos, quizá 21... Contando que 6 son para el manejo x-y de los holo-proyectores. El control de los tres leds RGBW para el interior de los holo-proyectores, los paneles pequeños de led (front-logic display) y el grande (rear-logic display), el front-PSI y rear-PSI que serán matrices de leds RGB.
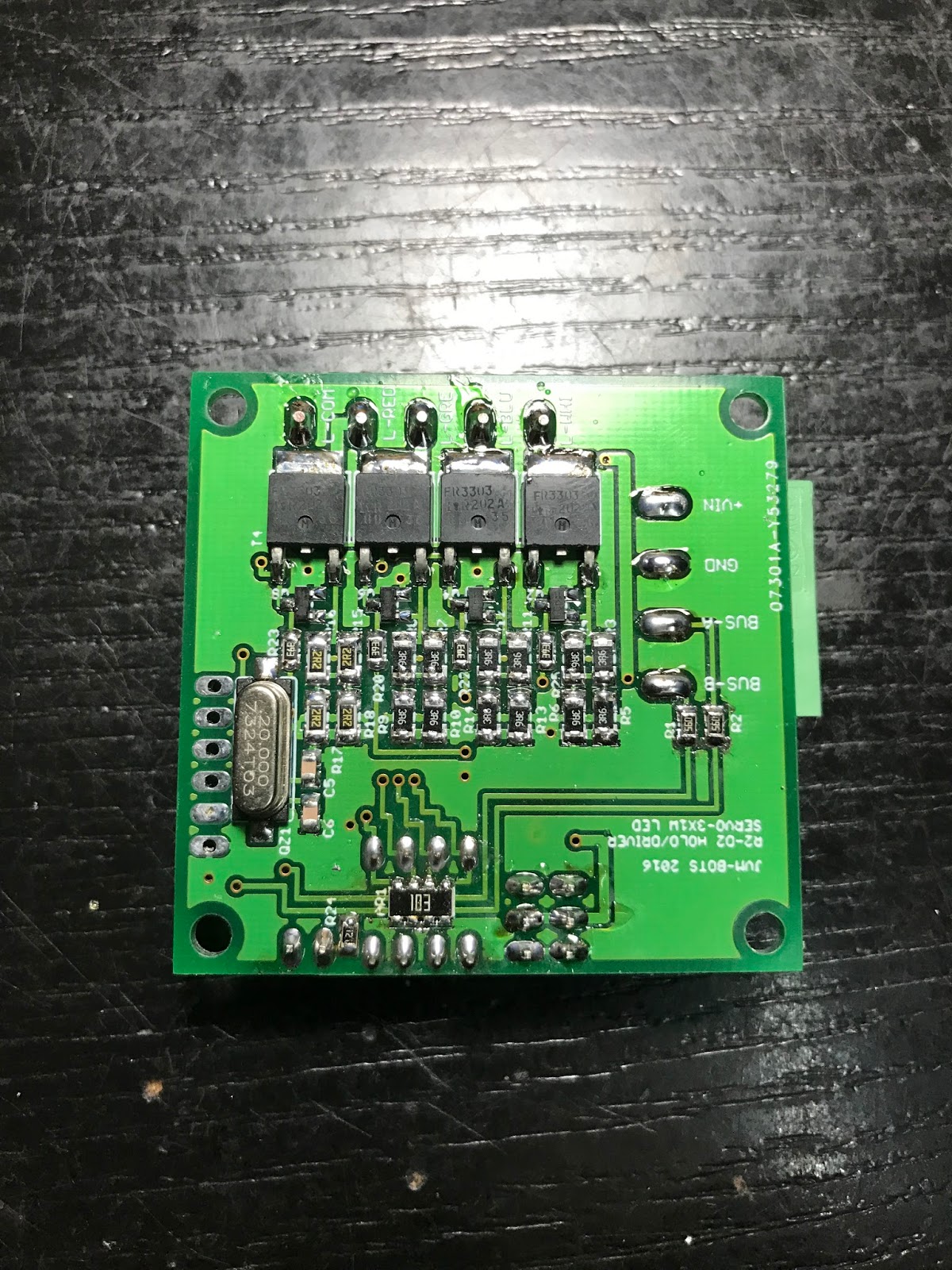
En 2011 desarrolle una controladora de servos para proyectos roboticos o pequeñas automatizaciones. Esta misma controladora con un par adaptaciones puede servir perfectamente para cumplir las necesidades de movimiento de servos de la cabeza y del cuerpo. por otro lado he de desarrollar pequeños módulos para el manejo de los holo-proyectores (aun no tengo claro si esto serán módulos independientes para cada holo-proyector o uno que maneje los tres).
Las matrices de leds rgb irán controladas con placas arduino y también estarán enlazadas al bus de comunicación.
Para manejar todo esto mi idea es que el robot tenga una interfaz de usuario donde poder "jugar" (interfaz de juego) con los movimientos de servos, luces y otros "chismes". El manejo del movimiento del robot sera mediante un mando RC y no estará implementado en la interfaz de juego.
Para la interfaz de juego voy a utilizar una Orange Pi. Esta placa es un mini-pc que puede albergar un servidor web y viene provista de conectividad wifi. A su vez, esta placa ira conectada a una "maestra" de comunicaciones que sera la encargada de comunicar con los modulos del robot (leds, servos, paneles...).
Os dejo una imagen para tener una primera impresión de la vista de la interfaz de juego... Esto ya esta funcionando y ofrece un gran abanico de posibilidades (no se necesita programar código para crear movimientos nuevos).

Cada unos de los botones que se ven en la imagen realiza una función.
- Los que tienen apariencia de servo accionan un solo servo a la posición que se le indica. Por ejemplo, para abrir manualmente una aleta necesitaríamos dos: uno la abre y otro la cierra.
- Los que tienen apariencia de ruedas dentadas, piñones o circulos con centro azul, son secuencias de movimientos. por ejemplo: una botón puede secuenciar abrir todas las aletas a la vez y otro cerrarlas.
En la parte inferior se puede ver una barra de herramientas con los diferentes tipos de boton para crear iluminación y efectos en los paneles.
Mas adelante conforme vaya avanzando el proyecto ire documentando...