Hace unas semanas recibí las pcb's del controlador que he diseñado para los holo-proyectores (foto 1). He ensamblado una para realizar las pruebas y terminal el desarrollo del firmware y han quedado como veis en las fotos 2 y 3
Foto 1
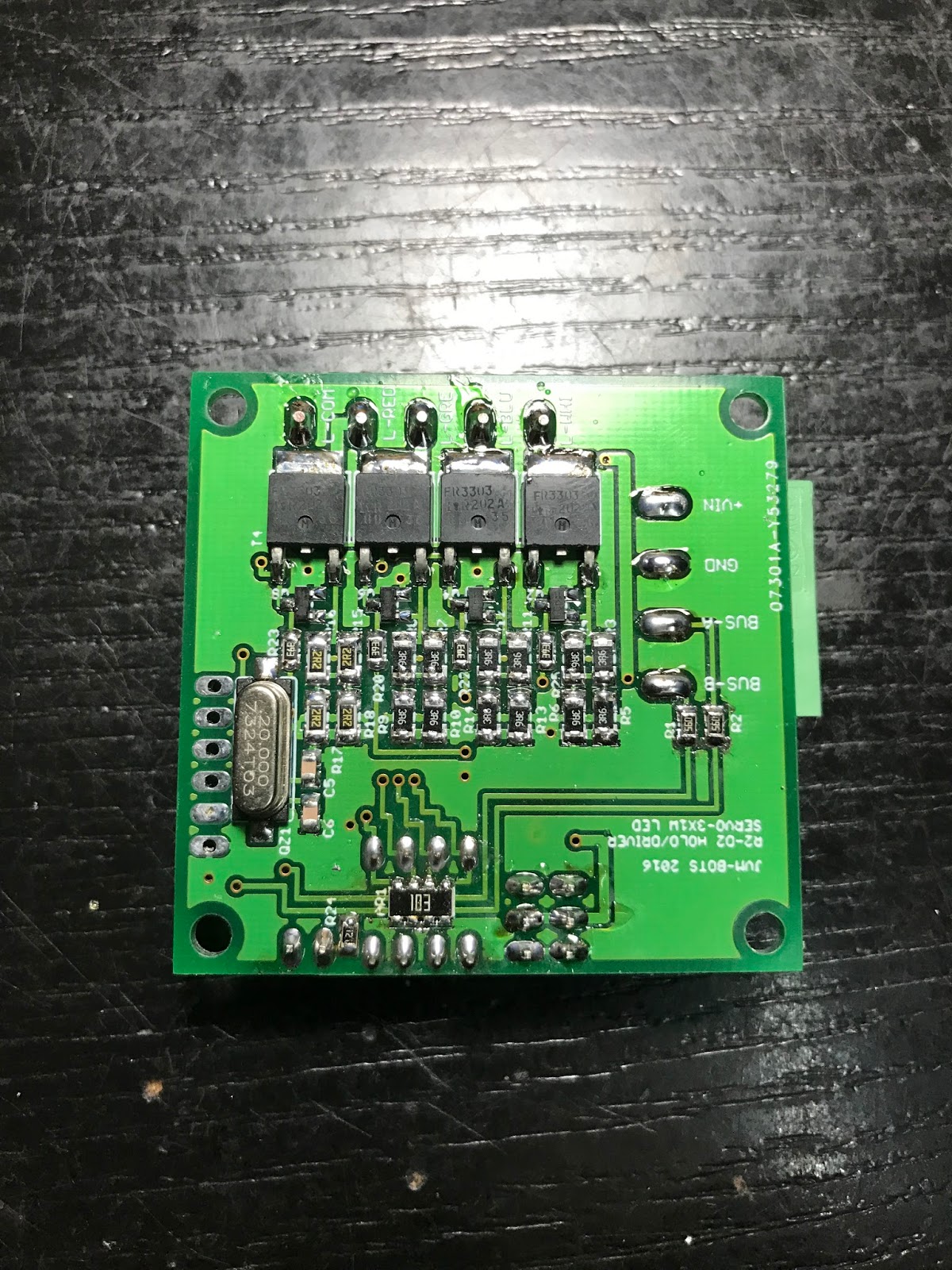
Foto 2
Foto 3
Tal y como he comentado con anterioridad mi intención es que cada "dispositivo" se comporte de forma individual y que a su vez también pueda ser controlado en grupo; en el caso de los holo-proyectores tienen unos comandos para su manejo individual y otros para manejo en grupo. Por ejemplo: se puede poner un holo-proyector de color verde y los otros de diferente color pero moverse sincronizados.
El controlador maneja un led de 4 colores de 1W y dos servos. Su alimentación esta comprendida entre 9 y 30v lo que facilita adaptarlo si el robot se alimenta a 12 o 24v. El tamaño es muy reducido, apenas 5x5 cmts y permite cambiar los colores con los 4 leds mencionados mediante PWM y mover los servos. Los interruptores dip permiten asignar la dirección en el bus, también dispone de una memoria interna donde se graban movimientos para que estén ejecutándose de forma aleatoria.
Los leds que van montados son estos:
Led
Fijado y cableado
Ensamblado
Aquí van las pruebas de color realizadas antes de tener el controlador montado:
Rojo
Verde
Azul
Blanco
De forma que el trabajo completado queda así:
Y un par de vídeos del funcionamiento en modo "Demo RGB" y "Strobe Blanco"